


|
个人信息Personal Information
副教授
博士生导师
硕士生导师
教师英文名称:Chia-Hung Wang
教师拼音名称:ChiaHung Wang
所在单位:计算机科学与数学学院
职务:副教授
学历:研究生(博士后)
办公地点:计算机科学与数学学院计算机科学与技术教研室
联系方式:校址:福建省福州市闽侯县上街镇学府南路69号福建理工大学 (邮编: 350118) 教师主页: http://faculty.fjut.edu.cn/wang_chiahung/zh_CN/index.htm ResearchGate Website: https://www.researchgate.net/profile/Chia-Hung_Wang2
学位:博士学位
在职信息:在职
主要任职:副教授
其他任职:研究生导师
毕业院校:(中国台湾)政治大学
学科:计算机科学与技术
电子信息工程
交通运输
信息与计算科学
数据科学与大数据技术
论文成果
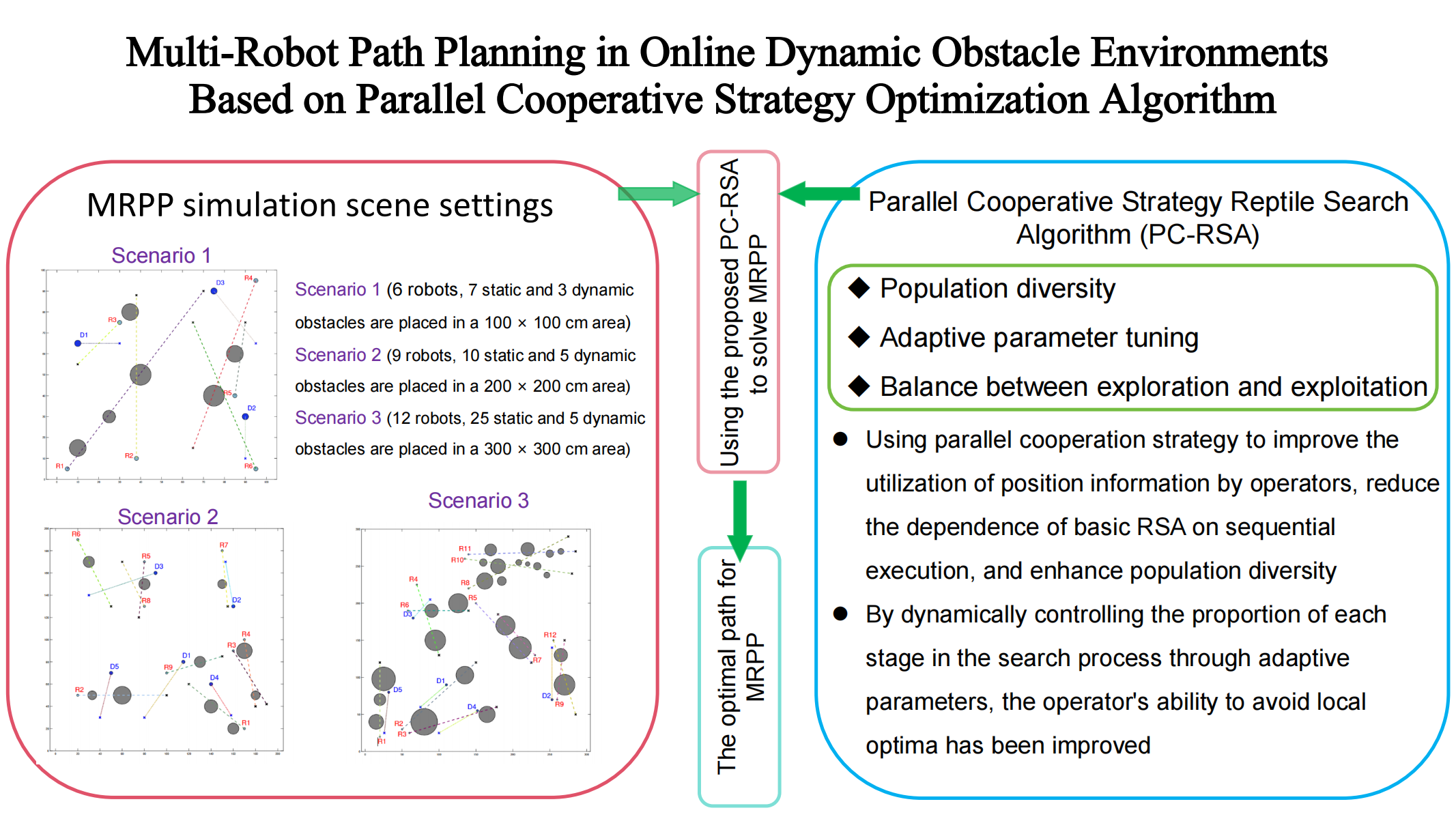
当前位置: 王嘉宏博士(Chia-Hung Wang, Ph.D.)中文主页 >> 科学研究 >> 论文成果Multi-robot path planning in online dynamic obstacle environments based on parallel cooperative strategy optimization algorithm
点击次数:
影响因子:1.7
发表刊物:Discover Computing
摘要:The obstacle avoidance path planning for robots has become a critical research focus, especially in the context of addressing complex tasks in dynamic, unstructured environments where unpredictable obstacles and varying conditions present significant challenges. This paper introduces the parallel cooperative strategy reptile search algorithm (PC-RSA) for multi-robot path planning in such dynamic settings. Path planning is crucial for mobile robots, especially in multi-robot systems, requiring solutions that adapt quickly to changes while ensuring efficiency and robustness. Traditional algorithms often struggle with dynamic obstacles and maintaining diversity during search processes. To address these issues, PC-RSA incorporates a parallel cooperative strategy, improving information utilization and balancing exploration with exploitation. The algorithm’s performance was tested using 10-dimensional and 20-dimensional benchmark functions from the CEC2022 test suite and compared with other state-of-the-art algorithms, such as GA, PSO, and RSA. PC-RSA outperformed these methods, ranking first in the Friedman ranking. It was then applied to multi-robot path planning in environments with both static and dynamic obstacles. Simulation results showed notable improvements over the standard RSA, with enhancements of 90.96%, 52.53%, 55.73%, and 62.71% in average path deviation error, average untraveled goal distance, total fitness value, and average execution time, respectively. These findings suggest that PC-RSA could be a promising approach for multi-robot path planning in dynamic environments.
论文类型:期刊论文
论文编号:132
学科门类:交叉学科
文献类型:J
期号:28
ISSN号:2948-2992
是否译文:否
发表时间:2025-07-01
收录刊物:SCI
发布期刊链接:https://doi.org/10.1007/s10791-025-09664-5
第一作者:王嘉宏
合写作者:吴晓晶,胡昆