
Alma Mater:National Chengchi University, Taiwan
Education Level:Postgraduate (Postdoctoral)
[MORE]1. Awardee of Excellent Young Role Models from Tainan County, Taiwan 2. Leading Scientists of the World 2009 3. Who's Who in the World 2013-2021 4. Who's Who in Science and Engineering 2016-2017 5. Who's Who in Asia 2017-2018 6. 福建省福州市台湾人才库成员 7. 中国海外杰青汇中华交流团(CSP)成员 8. 福建工程学院「本科优秀毕业设计(论文)指导教师奖」
Impact Factor:1.7
Journal:Discover Computing, vol. 28, 132. DOI: https://doi.org/10.1007/s10791-025-09664-5
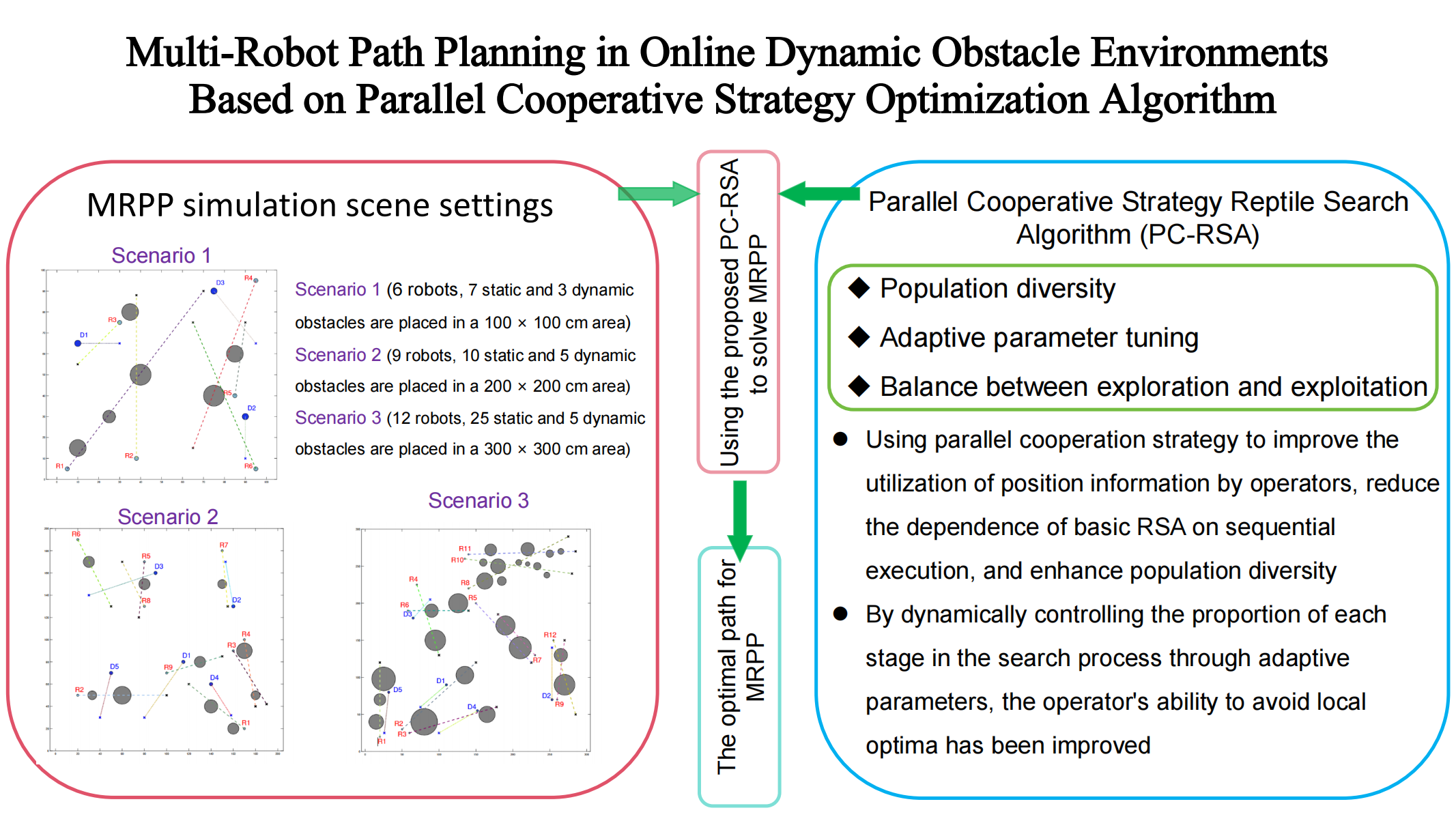
Abstract:The obstacle avoidance path planning for robots has become a critical research focus, especially in the context of addressing complex tasks in dynamic, unstructured environments where unpredictable obstacles and varying conditions present significant challenges. This paper introduces the parallel cooperative strategy reptile search algorithm (PC-RSA) for multi-robot path planning in such dynamic settings. Path planning is crucial for mobile robots, especially in multi-robot systems, requiring solutions that adapt quickly to changes while ensuring efficiency and robustness. Traditional algorithms often struggle with dynamic obstacles and maintaining diversity during search processes. To address these issues, PC-RSA incorporates a parallel cooperative strategy, improving information utilization and balancing exploration with exploitation. The algorithm’s performance was tested using 10-dimensional and 20-dimensional benchmark functions from the CEC2022 test suite and compared with other state-of-the-art algorithms, such as GA, PSO, and RSA. PC-RSA outperformed these methods, ranking first in the Friedman ranking. It was then applied to multi-robot path planning in environments with both static and dynamic obstacles. Simulation results showed notable improvements over the standard RSA, with enhancements of 90.96%, 52.53%, 55.73%, and 62.71% in average path deviation error, average untraveled goal distance, total fitness value, and average execution time, respectively. These findings suggest that PC-RSA could be a promising approach for multi-robot path planning in dynamic environments.
Indexed by:Journal paper
Document Code:132
Discipline:interdisciplinary subject
Document Type:J
Issue:28
ISSN No.:2948-2992
Translation or Not:no
Date of Publication:2025-07-01
Included Journals:SCI
Links to published journals:https://doi.org/10.1007/s10791-025-09664-5
First Author:Chia-Hung Wang
Co-author:Xiaojing Wu,Kun Hu
Click:
The Last Update Time:..

